#+SETUPFILE: ~/Dropbox/Doc/Org_Templates/level-1.org
QEMU 中的串口实现分为两个部分, 一个是 QEMU 为 Guest 模拟的 串口设备,
称为前段, 是 Guest 操作的部分, 一个是 QEMU 怎么通知该串口与外部通信,
也就是 QEMU 怎么把串口的输入输出定向到其它设备, 称为后端.
本文档讨论 QEMU 重定向 串口输入输出到 stdio 的情况, 分析串口的模拟实现, 怎么和 stdio 通信, 其它情况类似.
注意, 此时的命令行参数为
$ qemu-kvm debian.img -serial stdio
创建后端 stdio
解析参数
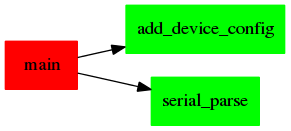
从入口函数来看, 其实很简单, QEMU 解析到用户传递了 -serial stdio,
会调用 add_device_config 函数向 device_configs 链表 添加一个设备,
方便以后 索引使用
struct device_config {
enum {
DEV_USB, /* -usbdevice */
DEV_BT, /* -bt */
DEV_SERIAL, /* -serial */
DEV_PARALLEL, /* -parallel */
DEV_VIRTCON, /* -virtioconsole */
DEV_DEBUGCON, /* -debugcon */
DEV_GDB, /* -gdb, -s */
} type;
const char *cmdline;
Location loc;
QTAILQ_ENTRY(device_config) next;
};
case QEMU_OPTION_serial:
add_device_config(DEV_SERIAL, "stdio");
然后, 等到 QEMU 处理完命令行的解析之后, 它开始初始化各种模块, 比如串口后端的 初始化模块
static int serial_parse(const char *devname)
{
/* ...... */
serial_hds[index] = qemu_chr_new(label, devname, NULL);
/* ...... */
}
int main(int argc, char **argv, char **envp)
{
/* ...... */
if (foreach_device_config(DEV_SERIAL, serial_parse) < 0)
exit(1);
/* ...... */
}
创建后端 stdio
通过上面的分析, 创建后端是由 qemu_chr_new() 完成的
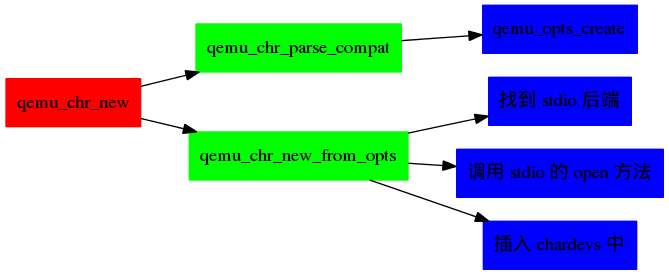
CharDriverState *qemu_chr_new(const char *label, const char *filename, void (*init)(struct CharDriverState *s))
{
/* ...... */
CharDriverState *chr;
opts = qemu_chr_parse_compat(label, filename);
chr = qemu_chr_new_from_opts(opts, init);
return chr;
/* ...... */
}
首先, qemu_chr_parse_compat 从 vm_config_groups 中找到 chardev
的链表, 然后创建一个名叫 “serial0” 的 qemu_chardev_opts 挂到该链表上
QemuOpts *qemu_chr_parse_compat(const char *label, const char *filename)
{
/* ...... */
opts = qemu_opts_create(qemu_find_opts("chardev"), label, 1, &local_err);
/* ...... */
return opts;
然后, 使用上面创建的 opts 创建真正的 stdio 后端
CharDriverState *qemu_chr_new_from_opts(QemuOpts *opts,
void (*init)(struct CharDriverState *s))
{
CharDriverState *chr;
/**
* 从 backend_table 中找到 CharDriverState:
* { .name = "stdio", .open = qemu_chr_open_win_stdio }
*/
for (i = 0; i < ARRAY_SIZE(backend_table); i++) {
if (strcmp(backend_table[i].name, qemu_opt_get(opts, "backend")) == 0)
break;
}
/* 调用 qemu_chr_open_stdio() 初始化设备 */
chr = backend_table[i].open(opts);
/* 插入到 chardevs 中, 这个链表是一个全局的字符设备链表 */
QTAILQ_INSERT_TAIL(&chardevs, chr, next);
return chr;
}
初始化 stdio
static CharDriverState *qemu_chr_open_stdio(QemuOpts *opts)
{
CharDriverState *chr;
/* 从标准输入0, 输出1创建一个字符设备, 在里面会将写函数的 callback 指向
fd_chr_write */
chr = qemu_chr_open_fd(0, 1);
/* 主要是向 main loop event 注册标准输入的读函数 */
qemu_set_fd_handler2(0, stdio_read_poll, stdio_read, NULL, chr);
return chr;
}
至此, stdio 的创建就完成了
串口模拟实现
串口是通过 QOM(QEMU Object Model) 实现的, QOM 的讨论超出了本文的范围, 下面只讨论 isa-serial 相关的实现.
isa-serial class 定义在 serial.c 中:
在初始化 machine 的时候(vl.c 中的 machine->init()), 会自动调用
serial_isa_init() 来初始化串口设备.
类的初始化
在初始化 isa-serial 的时候, 会把 serial_isa_init 赋值给 该类的 init
指针, 这个其实可以理解为该类的构造函数, 在创建实例的时候,
自动调用该函数.
/* 类初始化函数 */
static void serial_isa_class_initfn(ObjectClass *klass, void *data)
{
ic->init = serial_isa_initfn;
}
实例的初始化
实例的初始化用上面提到的 serial_isa_initfn 函数完成
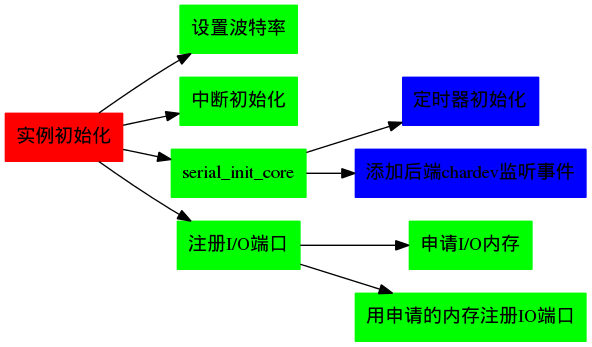
实例的初始化稍微复杂一些:
- 首先设置波特率
- 然后是中断的初始化,
isa_init_irq - 然后调用一个叫
serial_init_core的函数, 该函数初始化定时器, 将 它的后端(这里是stdio)添加到监听事件的loop中, 这个后端就是上面创建 的 stdio, 通过构造函数的参数传递进来 - 最后会向 ISA Bus 注册 I/O 端口. 这个过程分两部, 首先申请一个 8 Bits
的内存, 然后调用
isa_register_ioport把这部分内存作为 I/O port, 基地址 为 { 0x3f8, 0x2f8, 0x3e8, 0x2e8 } 中的一个, 在这个 I/O port 上, 还会 注册两个回调函数,serial_ioport_read和serial_ioport_write, 其中 read 会在 guest 请求读 I/O 端口的时候触发, write 会在 guest 写 I/O 的时候 触发.
两个设备通信
Guest 能访问模拟的串口, Guest 发往该串口的任何数据都会被 QEMU 捕获到, 然后 QEMU 会把真实的数据(除去控制信息外的数据)发往后端设备(这里是 stdio).
相反的, stdio 发往串口的数据也会被 QEMU 捕获, 然后 QEMU 会引发一个中断, 通知 Guest 有新的数据, 把数据送往串口.
下面分两种情况具体讨论:
Guest 发送数据
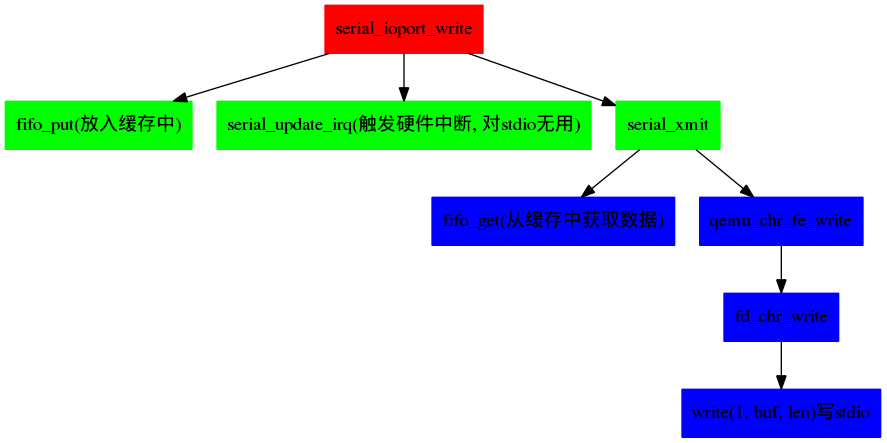
由上面的分析, 在串口初始化的时候, 在 I/O 端口注册了
serial_ioport_write 的函数, 当这个 I/O 端口有数据写入的时候,
会自动调用该函数.
- 首先, 判断是否是第 0 bit, 根据协议, 0 bit 代表 THR, 将数据用
fifo_put函数放入队列中缓存 - 然后, 触发一个硬件中断, 其实由于我们用的是 stdio 后端, 无用.
- QEMU 会最后会调用
serial_xmit函数来进行下一步的处理, 在该函数中, 首先 用fifo_get把缓存中的数据取出来, 然后发给调用qemu_chr_fe_write=(最终 调用 write(1, buf, len)) 在stdio中显示出来, 关键在于 =qemu_chr_fe_write中传递的参数 s->chr, 这是在初始化串口实例的时候传递的后端设备的指针(stdio)
Guest 获取数据
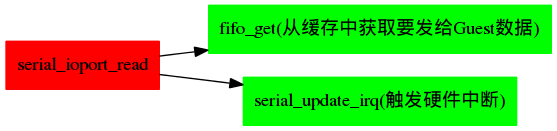
类似 Guest 发送数据, QEMU 捕获到 I/O 端口上 Guest 请求读数据, 自动调用
serial_ioport_read() 函数把数据从缓存中读出来发给 Guest.
- 首先, 判断是否是第 0 bit, 根据协议, 0 bit 代表 RBR, 用
fifo_get函数 把数据从缓存中读出来 - 然后, 触发一个硬件中断
- 返回从缓存中读出的数据
stdio 发送数据
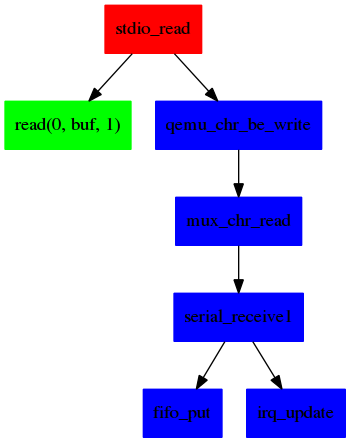
- 首先,
main_loop监听到 stdio 有数据可读, 调用 stdio 后端注册的stdio_read函数读取数据, 最后调用qemu_chr_be_write, 发送数据 qemu_chr_be_write最终会调用serial_receive1函数来获取该数据, 这是通过 串口初始化的时候以下代码实现的.- 最后
serial_receive1把数据保存在缓存中, 触发一个中断
qemu_chr_add_handlers(s->chr, serial_can_receive1, serial_receive1,
serial_event, s);
stdio 接收数据
其实就是 Guest 发送数据后, 接受的过程, 见前面的分析